In my opinion, the PiWars2022 Shepherd’s Pi Game has been the most difficult PiWars game to date. The arena is crowded, and there is very little time to complete three runs.

The normal front loader servos are used to lift the sheep over the bonnet of the robot (as can be seen in the picture). This is useful as it doesn’t change the balance of the machine (so that the pivot point during turns doesn’t change much). It also keeps the camera view clear to enable vision based guidance while moving the sheep.
This lift design (which is the second attempt) is able to place a sheep over the fence of the pen; this made the game play quicker in the video. It has a pair of servos to grip the sheep; these are aided by small rubber, self-adhesive discs that we picked up from Amazon.
To get this game working it was necessary to re-tune the robot motor control PIDs and dead reckoning system. I think the tuning required for tracks is not the same as the tuning that was carried through from last year’s (wheeled) robot. The robot now moves about the arena more accurately.
I added several coloured discs around the arena to provide additional localisation opportunities during the game, see below.
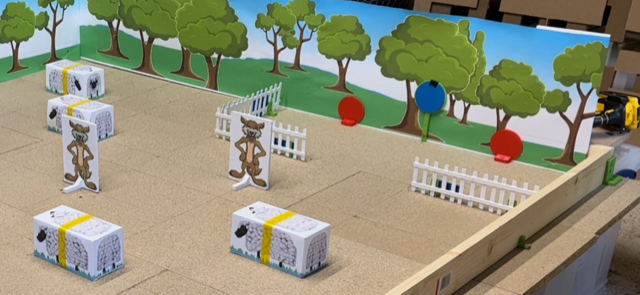
The “sky” on the sheep decorations was removed; this had been the original localisation target for the robot but was rather error prone. A yellow band was added which is a more robust target.
Originally, the pen was made from Lego train track pieces connected to 3D printed supports. However, these were about 10mm longer than required which made the entrance to the pen about 20mm too narrow. That 20mm proved to be important, but I couldn’t bring myself to cut the tracks down. Instead I designed and printed some new pen walls; they were made to look suitably aged to fit with the “Old McDoofus” theme. Actually, they are derived from the trough planks I made for “Feed the Cattle”.


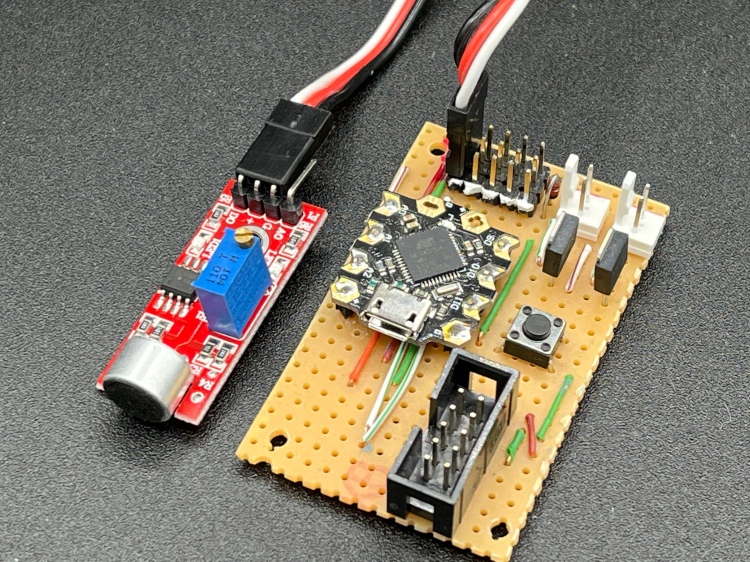
To finish off, a whistle detector was made. It turns out the last year’s feed the fish controller (on the right in the picture), combined with a little microphone preamp board (on the left) that someone bought for my birthday years ago, could do the job. Using the FtF controller made things easy; it already had the appropriate interface (that 10-way Molex) to enable it to talk to the robot.
Here is the video of PJD playing Shepherd’s Pi:
