In this game the robot must about turn (as it starts facing the wrong way), then pick up three coloured boxes in the correct sequence. Finally, it must deliver the boxes to the finish. More points are available if the boxes are delivered in a stack, and the game is against the clock.
For this we built a box lift that can pick up the three boxes as a stack; see below:


In this image the boxes are raised so that the camera can “see” under them. Unfortunately, PiDrogen’s normal front-facing ToF sensor is set to high in the chassis so “looks” over the top of the boxes; a second lift ToF is installed instead.
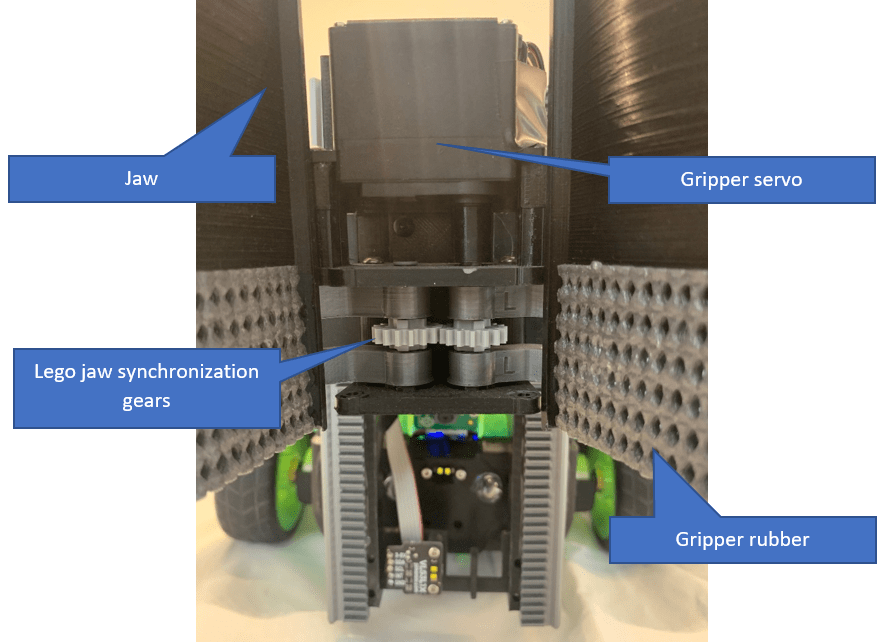
This view shows the jaws open. Here, the gripper servo and Lego jaw synchronisation gears can be seen. Rubber is used to grip the bottom box of the stack only.
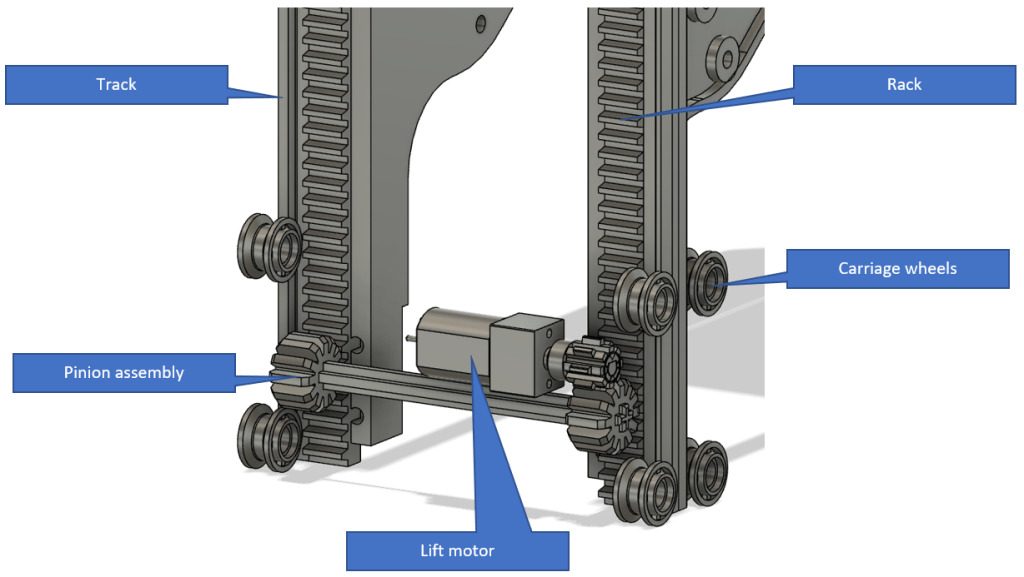
A cut-away Fusion 360 render of the carriage assembly. The carriage wheels, pinion assembly and lift motor are all mounted to the carriage which moves up and down the tracks and racks (which are attached to the robot top deck).

This is the view of the lift from the robot point of view, looking forward. A photo-interrupter is mounted to the carriage. As the carriage descends the light beam blade (which is mounted to the robot) breaks the beam of light between the photo-interrupter arms. This marks the bottom of the lift travel. The motor is fitted with a magnetic encoder; pulses from this are used to measure the distance of the carriage up the tracks.
