Things have been quiet on the blog front from team PiDrogen. So, since we are snowed in, what better opportunity for an update?
Well the blog has been quiet because we’ve been coding just as fast as we can. 😀
We’ve developed a peripheral controller based on an Arduino Due. Here’s the breadboard version:

The Due connects to the servos, the SBUS on the radio receiver and to some I2C equipped sensors. It then connects to the Pi via a USB port. The Due updates the Pi several times a second and takes instructions from the Pi to set servo positions etc. Jay, who has recently been press ganged into the team, is busy building a strip board interface to replace the breadboard rat’s nest that you see here.
In addition to this, chief coder Dad has been writing the Pi code. It’s written in Python which he’s new to; so there have been times of slow progress. It basically works (although it’s hard to use unless you attach a keyboard; that’s gonna need work!). Here’s a picture of the app running in calibrate mode:
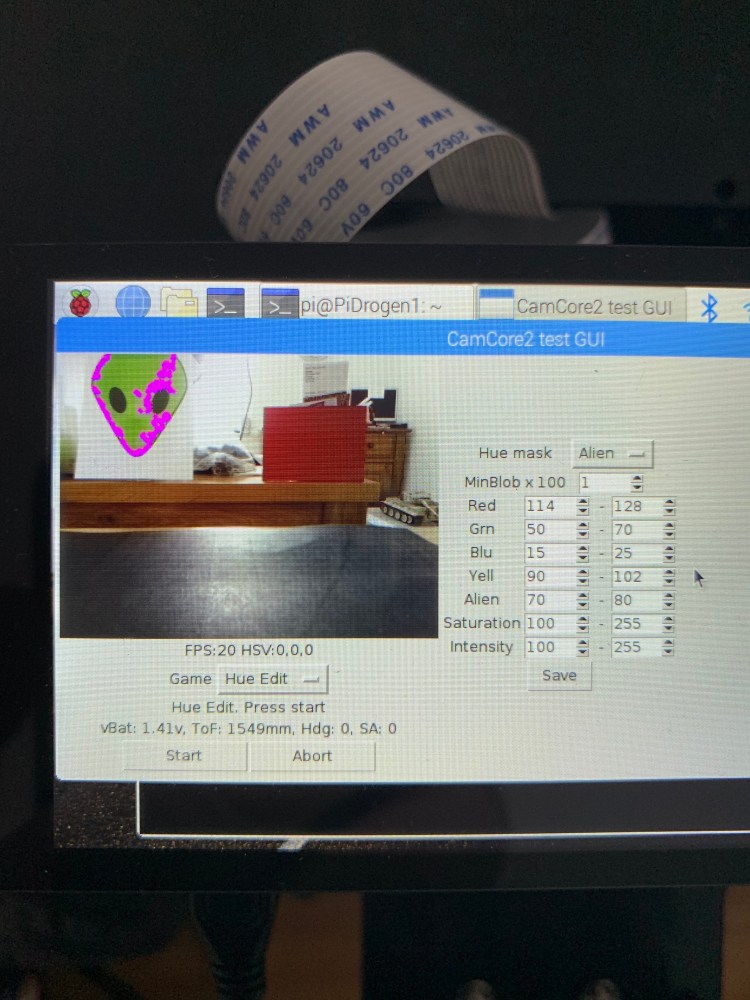
The image is the view from the Pi camera with the alien outlined in pink by open CV, all at 20 frames per second; pretty impressive for such a small device!
Next for us is to rebuild the chassis. The electronics are turning out to be larger than expected and things are getting a little tight in PiDrogen. Tight fitting electronics and LiPo batteries doesn’t sound like a good combination. 🤔
