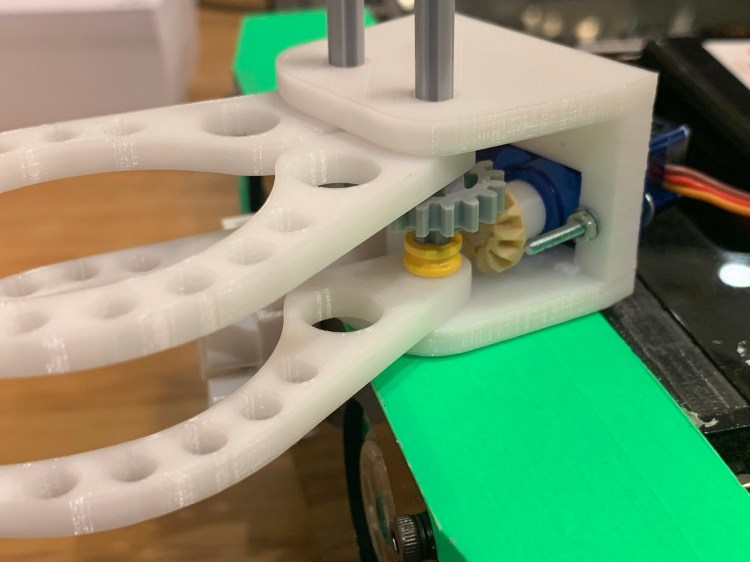
Version 2 of the barrel lifter has now been printed and tested. The (horribly vague) cable connection between the jaws and servo of the first attempt has been replaced by a bevel gear mounted on the servo output shaft. The drive also incorporates a 2:1 reduction so that a half turn of the servo output equates to a quarter turn on each jaw.
I’m delighted to say that it works a whole lot better than it’s predecessor.
