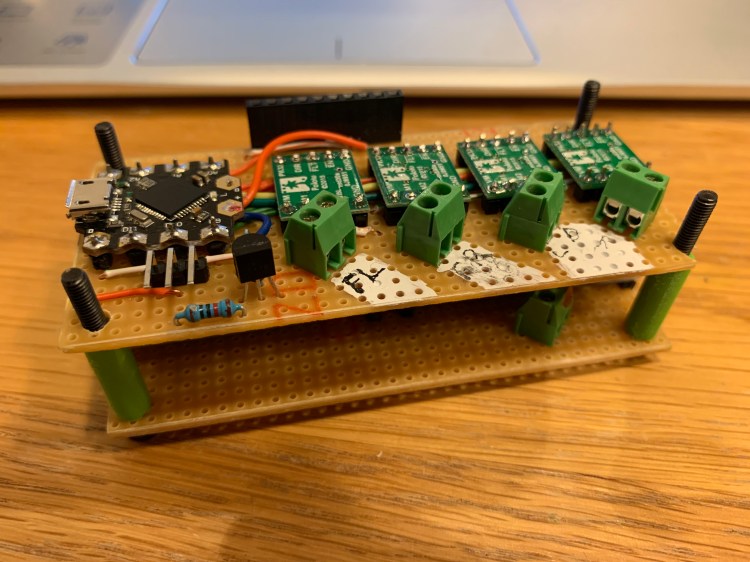
We built some electronics. This is an Arduino Beetle driving four Pololu motor drivers (which are based on MAX14870 chips). The lower board (which you can’t really see) holds a couple of DC-DC converters which convert our 4S LiPo voltage down to a nice smooth 5.2v for the Pi and the other electronic bits. The Pi can talk to the motor driver board via the USB port and direct the speed and direction of the motors. Well it should do anyway.
Unfortunately it doesn’t work. The motor drivers (which are rated at 2.5A peak) report an error (which I think means “too much current”) so the motors just buzz rather than move. On paper this should all work; the motors have a stall current of 1.4A. But unless we limit the motor current to about 800mA the drivers refuse to play ball.
I’ve heard it said that you have to massively over-specify motor drivers. Now I see that’s true.
We are not amused. This is a setback.
