I always felt that the mecanum wheels we use on P21 were too large; they’re about 100mm diameter. I think they are not really suited to delicate autonomous manoeuvres.
Over Christmas I decided to gamble on buying a set of these from Pimoroni…

These wheels are cheaper than ones I’ve seen before (£24 for a set), and are about 36mm diameter.
I say gamble because the website doesn’t specify the size of the hexagonal hole on the back of the wheels. I hoped the hole would be the right size for the hubs we use on our robots…
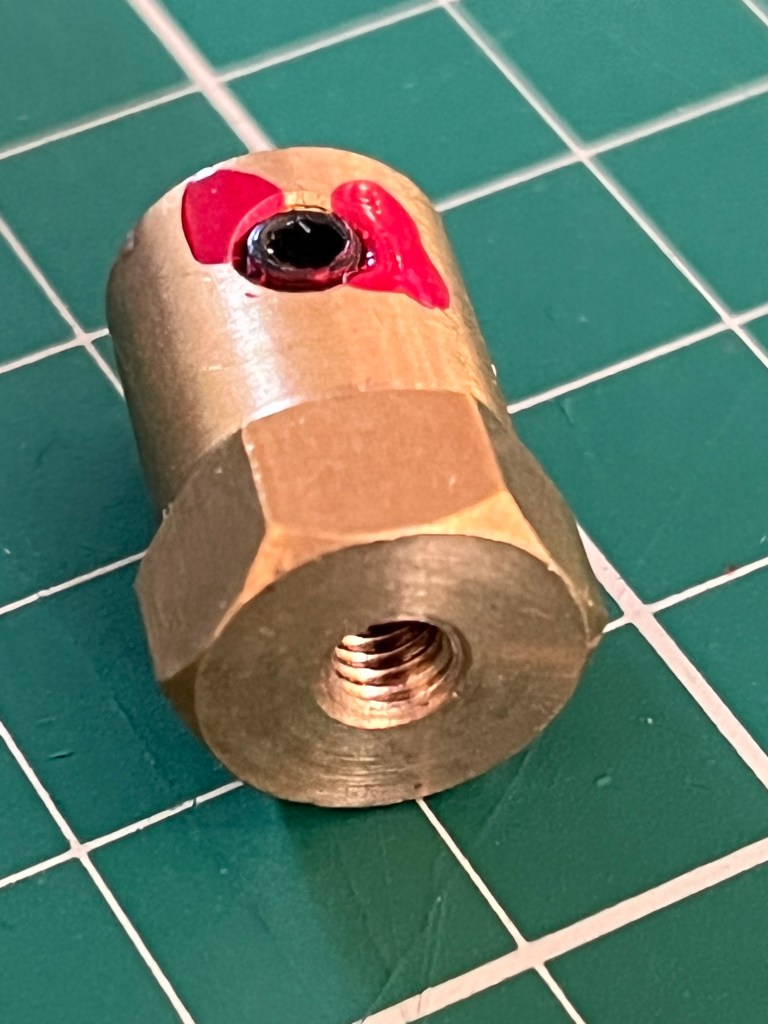
Unfortunately the holes on the wheels were too small, so the hub didn’t fit.
I thought about 3D printing a new hub to connect the motor shaft to the wheel but didn’t think I could make it strong nor accurately enough.
I decided to enlarge the hole in the wheels. I preferred this method as this keeps these wheels compatible with the hubs we use on all our robots. Well, assuming I could make it work of course; this is what you might call a high risk / high reward approach.
I 3D printed a jig to hold a single wheel, with M4 bolts to clamp the wheel in place. The jig can be screwed down to the spoil board on the CNC router at Exeter FabLab.
Next, I created a tool path in Fusion 360 to machine 0.7mm from each face of the hexagonal hole…
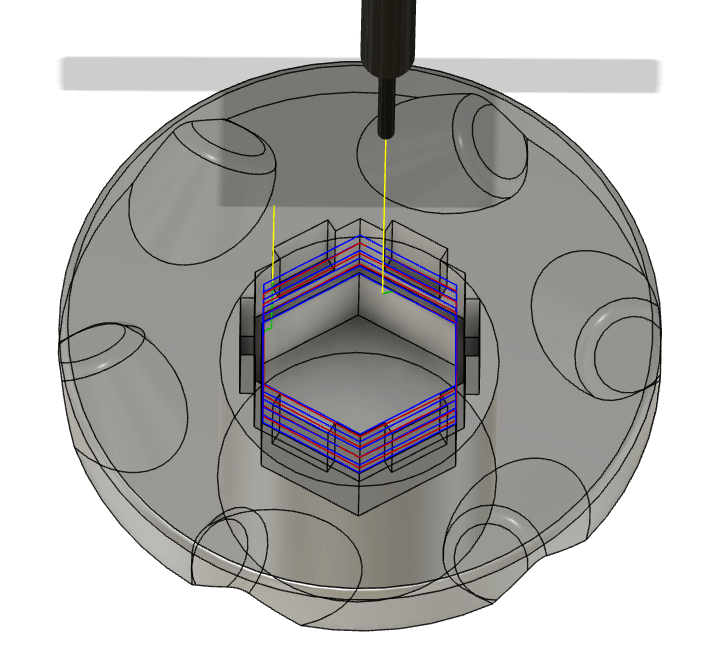
Amazingly, this all worked. I was able to machine off 0.7mm from each face of the hexagonal hole on Exeter FabLab’s Denford router. The cut is just right, the hubs are a nice snug fit in the wheels.

Hopefully, I can get some time to test these new wheels in the near future.
