It was soon clear that our existing Nerf gun design was not well suited to the new shooting game, “Feed the Fish”. The gun is designed to hit a target using a projectile trajectory which is as flat as possible; but the new game needs the projectiles to drop into the opening in the top of a box. Also, the game is timed, and it is permitted in the rules to fire five projectiles at once.
We decided that it would be better to start again, this time with a catapult style device that could lob projectiles rather than shoot them like a gun. Also, it could then fire five rounds at once.
This is a render of the first design, which is designed to be 3D printed:
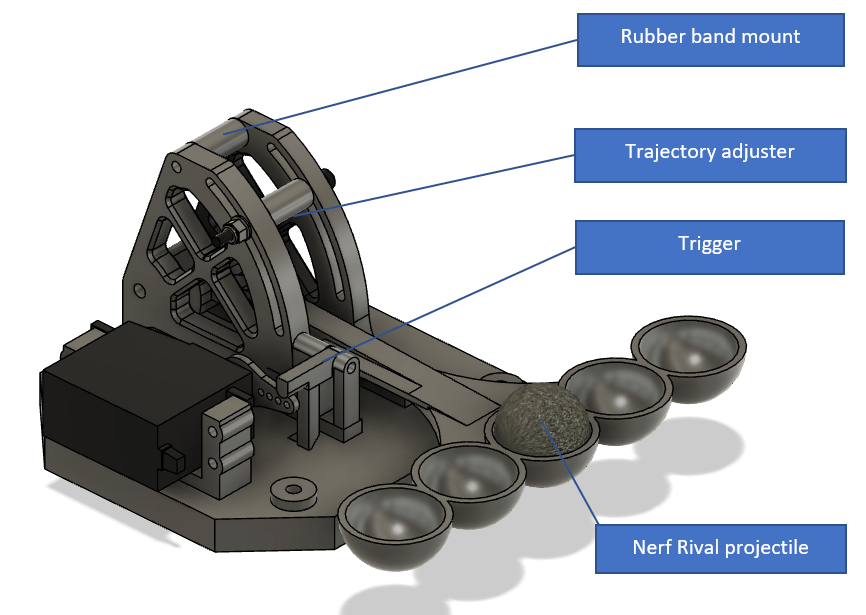
We realised that the device should not be powerful, so it uses a rubber band (connecting the arm to the rubber band mount) to store energy. The actual amount of energy stored can be adjusted by adding more bands or by tightening them.
The amount of travel in the arm can also adjusted with the trajectory adjuster. The adjuster is mounted between two arced slots; if it is fitted towards the bottom of the slots then the arm moves a small amount, and the projectiles fly mainly upwards with little forward movement. If the trajectory adjuster is fitted towards the furthest end, then the projectiles fly lower but with greater distance. After a few test fires we found a good position, roughly halfway round the arcs.
To fire the catapult the servo lifts the trigger momentarily, releasing the arm. Reloading is then a case of pushing the arm back down to tension the band and replacing the five Nerf “cannon” balls. When the arm is pushed down the trigger automatically locks it in place, ready to fire. Reload can be done quickly which was one of our requirements for the new design.
This system works well; once adjusted it frequently achieves five out of five shots into the aquarium. But it does require that the robot return to the fire position very accurately.
Having the robot return to the same position rapidly might be difficult to achieve. So, we designed a second version which includes a turntable and camera mount, the idea being to rectify small location inaccuracies by aiming the catapult autonomously with a vision system.
Here is a render of version 2:
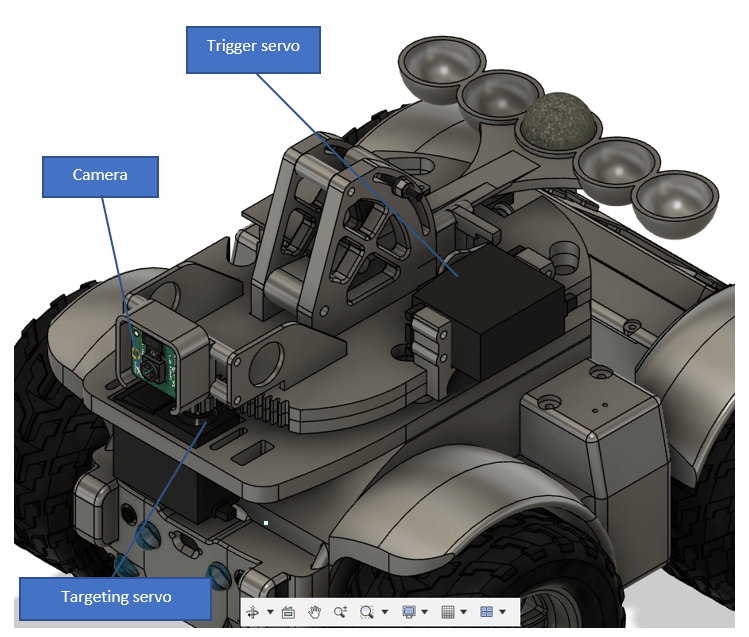
This version has the same catapult mechanism as version 1. But it is mounted on a turntable which can be turned by the targeting servo. A raspberry pi camera module is also attached so that the whole system can be rotated (by about +/-10 degrees). This is a small amount, but we think it is about right for targeting a gun.
Version 2 also fires forward (version 1 fires sideways). This is useful since it allows the robot to approach the firing position while measuring the distance to the aquarium with its forward-facing ToF sensor.
To begin with we will try to use PiDrogen’s odometry, ToF and inertial measurement systems to align the whole machine on the target. But if this is too unreliable (i.e. too many shots miss) then we will write code to automatically target the aquarium based on camera feedback to make small turntable adjustments.
We’re pleased with the turntable design. Assuming it works well we will adjust the Nerf gun to use it too.
