We have progress to report on the Tidy Up the Toys challenge.
To begin with we thought we would adapt our Eco Disaster barrel lifter (shown below) for the tidy up the toys challenge.
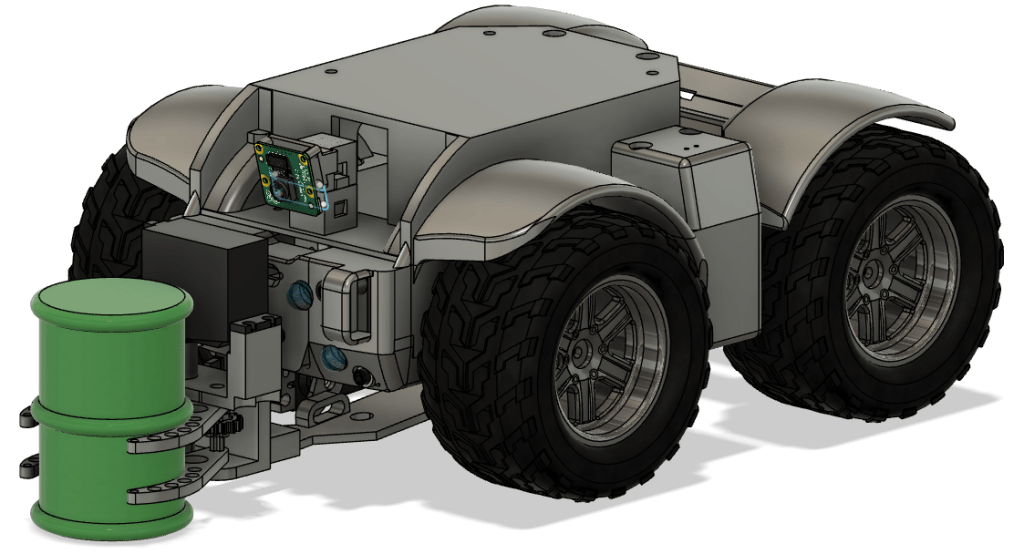
However, this has a few shortcomings:
- The barrel lift only raises the barrels by about 15mm. This is plenty for Eco-Disaster but not adequate to place one toy box (which are 50mm tall) onto another.
- When the barrel lift is carrying a barrel, the camera is more-or-less blinded. To be honest, this is not ideal for Eco-Disaster either.
- When PiDrogen is picking up a barrel it uses its forward-facing time of flight (ToF) sensor to measure the distance to the barrel. But the ToF sensor is mounted too high in the chassis to see a box; instead, it looks over the top.
- Finally, various components of the barrel lift are mounted under PiDrogen’s hull. As a result, it is necessary to use large diameter tyres when using it. However, autonomous manoeuvres work better when PiDrogen is fitted with smaller diameter wheels.
We ended up designing a new lift system; see below:
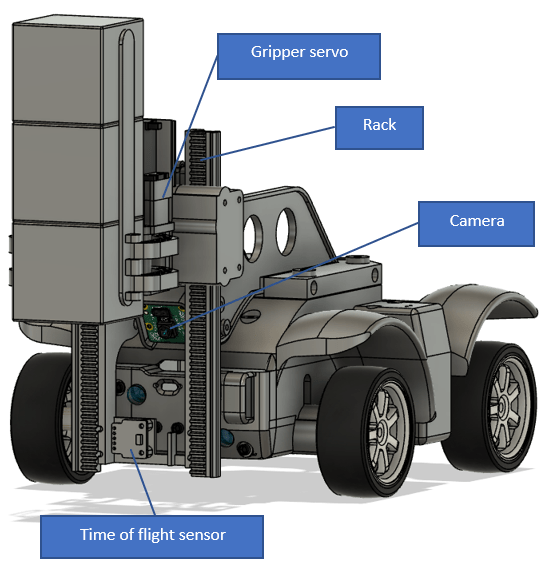
The new design addresses the issues previously mentioned:
- It can lift boxes beyond 50mm, so it can place one box on another. It can also lift one, two or three boxes, so it can place two boxes on a third box, then lift all three.
- The lift mechanism now uses a rack and pinion system which operates more smoothly than the barrel lift (which used a servo to create the lifting motion). This means the lift can reliably lift three boxes without them toppling.
- If the lift moves high enough (up to about 80mm) then the camera can see under the lift mechanism, even if it is carrying boxes. So, the lift can pick up a box, raise it above the camera’s field of view, then use camera guidance to find a further box.
- A new ToF sensor is mounted low on the static frame of the lift so that it can measure the distance to a box when lining up to pick it up.
- The new design is compatible with the smaller diameter wheels, as can be seen in the image.
The toy box lift works reliably under radio control. The next step is to write the code to allow the robot to play the game autonomously.
Hopefully, we will get to play Eco-Disaster one day. Assuming we do, we will probably adapt this design to lift the Eco-Disaster barrels as it has several advantages over the previous barrel lift:
- It could carry two (or possibly even three) barrels at once.
- The robot can be fitted with small diameter wheels which are better for delicate manoeuvres.
- The camera can still see forwards when a barrel has been lifted. So, it should be possible to steer around obstructing barrels.
Now, let’s go write some toy-box-locating vision software.
