Yikes! It’s June. 18 days left. Better get on with it.
When we record the obstacle course, we plan to be running PiDrogen’s recording strategy. This records a video from the robot’s camera and marks it up with various information, a bit like a Head Up Display (HUD). See below.
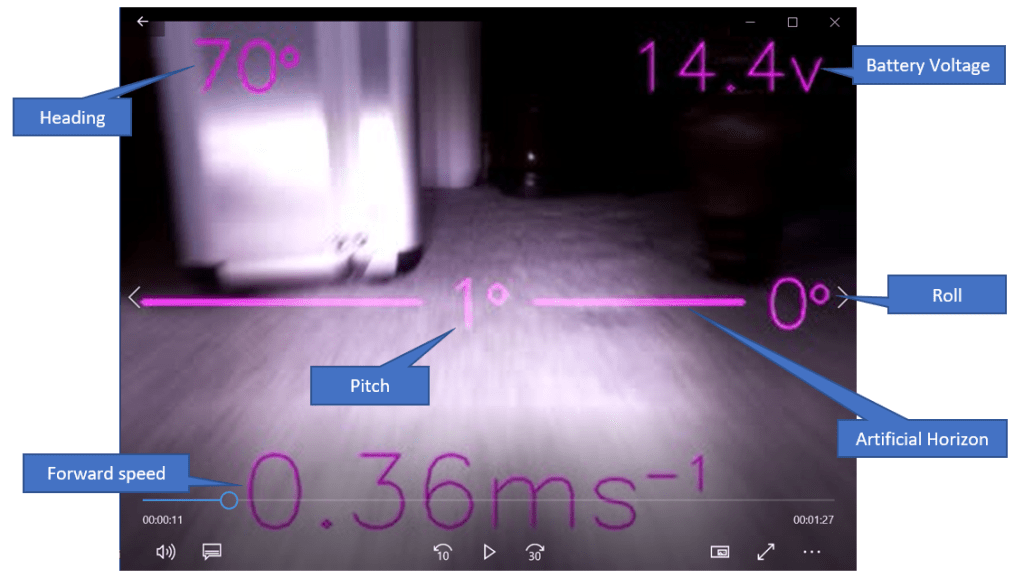
The HUD reports the heading of the robot (assuming it was booted facing due North, measured by the IMU), the pitch and roll angles (also from the IMU), the battery voltage, and the forward speed. An artificial horizon is used to represent the pitch and roll angles.
The plan is to submit an uninterrupted video from a phone (as required in the rules) but use snippets from PiDrogen’s camera as a picture-in-picture.
When the software was written, the maximum speed of the robot was estimated (i.e. not measured) at 1.9ms-1. But when I thought about it, covering nearly two metres per second seems pretty quick. I thought I should check my facts before submitting any videos!
The speed estimation was based on the following data:
- The motors are rated at 350RPM at 12v with no load. However, the robot uses 4S LiPos which deliver between 16.8v (fully charged) and 12.4v (when the battery protection circuit shuts down). For the calculation I made the assumption that the motors would still rotate at 350RPM when driving the robot (i.e. under load) due to the additional voltage.
- The obstacle course wheels are 104mm diameter.
So, the estimated speed = 350RPM x 104mm x π / 60 = 1.9ms-1.
Today we measured out a 5 metre course on our drive and timed the robot driving the length of the course at full speed using fully charged batteries. We took four measurements, two in each direction (since the drive isn’t quite level). The measurements were taken by hand (so are not likely to be particularly accurate), so were recorded to 0.1s accuracy.
The times measured were 2.2, 2.8 2.6 and 2.9 seconds.
The average time is 2.6 seconds. 5 metres in 2.6 seconds equates to a speed of 1.9ms-1.
Cool, the estimate was right! That’s satisfying / a relief!
