Our apple picker uses fork like prongs protruding to the front of the robot. The robot drives up to the tree, guided by the camera looking for the apple on the middle branch. The prongs dislodge the apples which (hopefully) drop into the chutes below.
However, this wasn’t all that reliable to start with; sometimes the apples were knocked in front of the robot, or they were not dislodged from the branch. So, the design of the forks went through several iterations in an effort to improve the performance of the system.
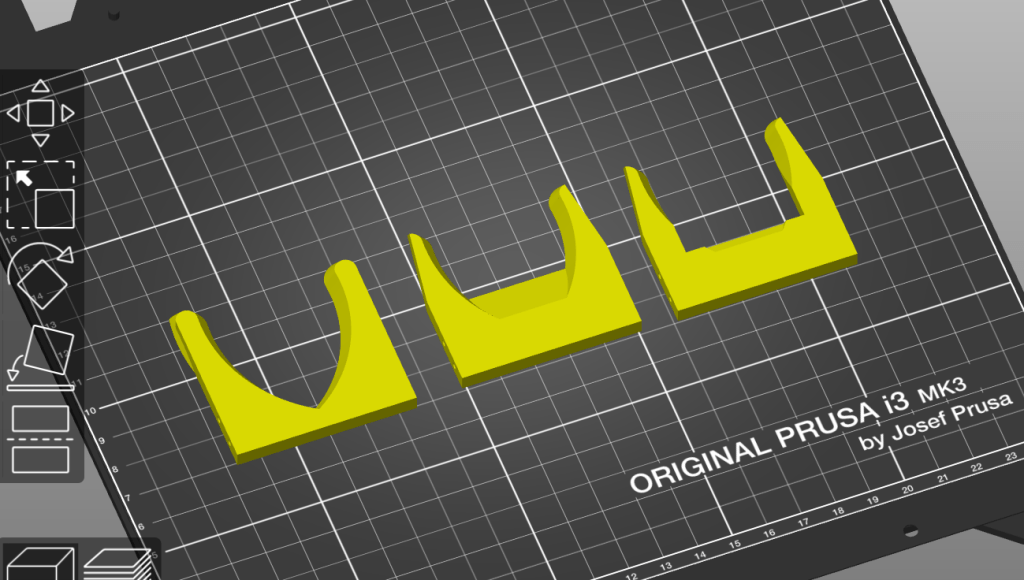
The final design (in the right of the picture) doesn’t make direct contact with the apple. Instead, a piece of insulation tape is attached across the prongs. The more compliant nature of the tape seems to be just the job to knock the apples without bouncing them forwards.
