Earlier in the month I said we were dropping Shepherds Pi in favour of the other autonomous games. Things have moved on since then…
To start with, we finished videos of the other two autonomous games that could be submitted. I think we will probably attempt new videos of both; we can certainly get them slicker, but I’m happy for now. This made Shepherds Pi the new priority.
Secondly, I re-tuned the robot motor control PIDs and dead reckoning system. I think the tuning required for tracks is not the same as the tuning that was carried through from last year’s (wheeled) robot. The robot now moves about the arena more accurately.
I added several coloured discs around the arena to provide additional localisation opportunities during the game, see below.
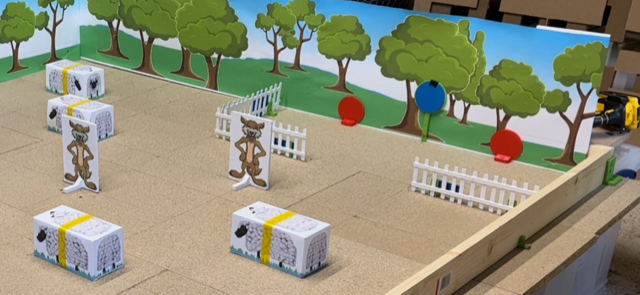
The “sky” on the sheep decorations was removed; this had been the original localisation target for the robot but was rather error prone. A yellow band was added which is a more robust target.
Originally, the pen was made from Lego train track pieces connected to 3D printed supports. However, these were about 10mm longer than required which made the entrance to the pen about 20mm too narrow. That 20mm was proving to be important, but I couldn’t bring myself to cut the tracks down. Instead I designed and printed some new pen walls; they were made to look suitably aged to fit with the “Old McDoofus” theme. Actually, they are derived from the trough planks I made for “Feed the Cattle”.


We now have a video of Shepherd’s Pi being performed autonomously, although we are not even close to being able to perform the target three rounds.
The next step is to re-film the challenge with the whistle detector installed.
