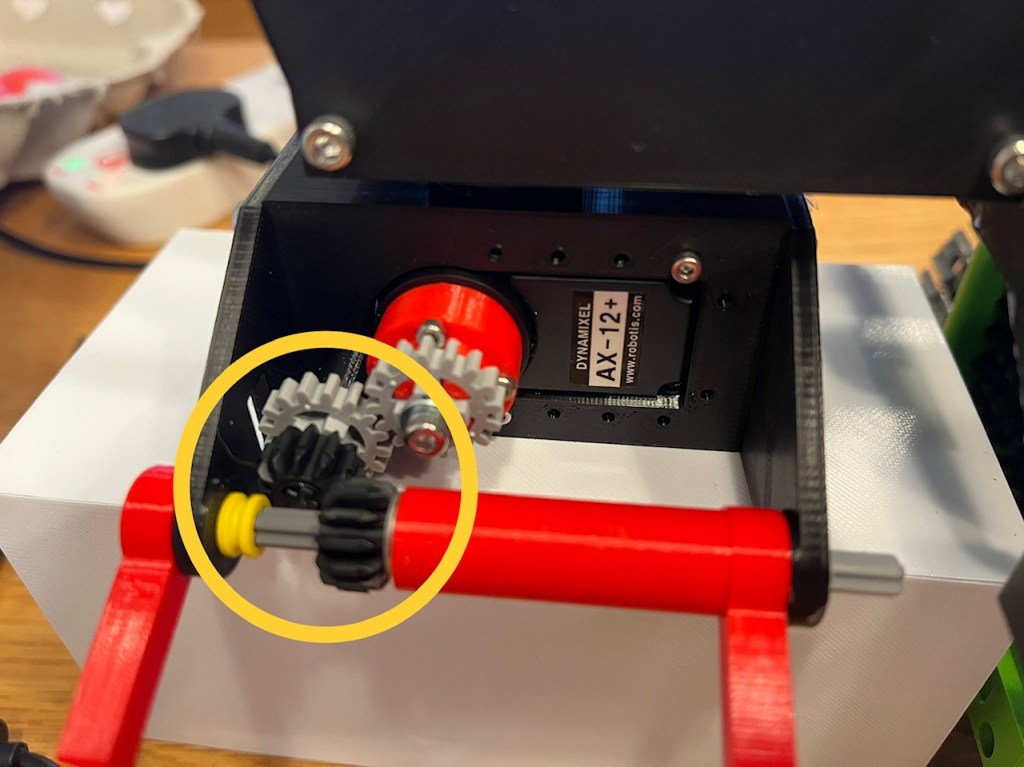
This is the sheep lift I built for Shepherds Pi.
Unfortunately, it doesn’t work. The right-angle drive shown in the highlighted circle (which is made of Lego parts) is used to grip the top of the sheep. However, the shaft that carries the drive from the servo flexes when too much torque is applied. This results in the gears jumping and the mechanism loses synchronisation. The system is unable to apply enough grip to lift the sheep.
I have reworked the design so that the shaft is supported between the servo drive gear and the right-angle drive. While I was at it, I added a mid-support for the shaft that holds the jaws of the grip too.

