It’s been a mixed weekend.
First the good news…
The good news is that my test on an Archimedes’ screw-based cattle feed delivery system went well. I’m now printing the remaining parts (a hopper and a chute) to complete the build. (Actually, that would be half a build; I plan to use two of them.)
Furthermore, it seems that it should be possible to deliver a measured quantity of feed based on the motor run time. It may not be as quick as some of the other systems I’ve seen, but I like the idea of an Archimedes’ screw.
Now the not good news…
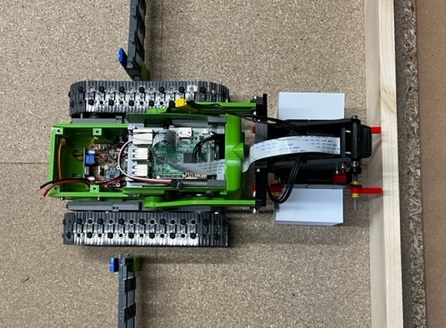
The bad news is that the Sheep-pen-ator is not fit for purpose. My plan had been to drive into the pen then have the robot make a right-angle turn in order to tuck the sheep into the corners of the pen. However, the picture shows that it will not be possible to make the turn as the robot will still be in the gateway.
It feels late in the competition for such a fundamental problem.
