I designed this hopper for the Hungry Cattle game.
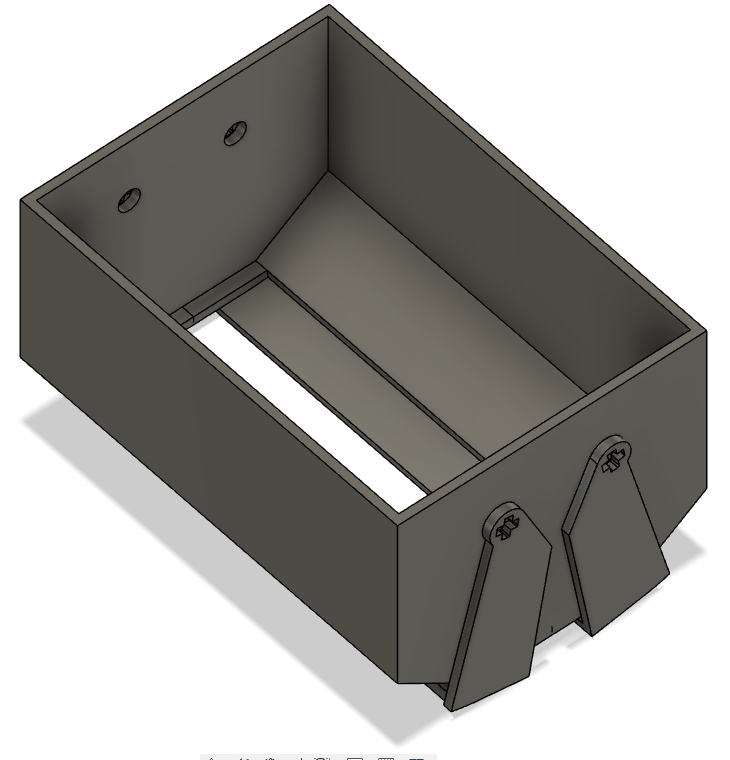
The door hinges are set at the correct pitch to allow synchronisation by a pair of Lego gears. A servo would be mounted at the back to drive the doors. Each hopper is 70mm wide and the plan would be to mount three of them across the robot, with each carrying slightly more than the half a trough of rice required for the game.
However, I’m not pleased with this design. Although I think it could work, the angle of repose (see previous blog post) for rice means that the path from the back of the hopper to the delivery chute at the front of the robot must be at 35o to the horizontal. Furthermore, I would like to put the centre of mass of the rice between the robot’s axles. This all means that the rice ends up needing to be mounted high on the vehicle.
I think the robot will not be stable if there is a lot of mass mounted high on the chassis.
There are various options to mitigate this, such as placing the hoppers partially in front of the front axles or setting the hoppers on an incline. But ultimately a gravity fed system requires the rice to be substantially higher than the edge of the troughs.
So, I wondered about a design which uses motors rather than gravity to deliver the rice.
After quite a few failed attempts, I managed to design an Archimedes screw in Fusion 360:

I am going to try to 3D print this. If that works, I will design the rest of the system.
If I can build it and it works then it will be possible to mount the rice lower on the chassis, between the axles.
I also wonder if it might be possible to use a single mechanism and run the delivery motor for a predefined time to deliver a measured dose.
