If you follow this blog, then you’ll know that there have been two designs for the Feed the Cattle mechanism; a hopper with doors and one based on an Archimedes’ screw.
Well, now there’s a third (and can I say final?) version, which has been inspired by the work of a couple of other teams from the competition.
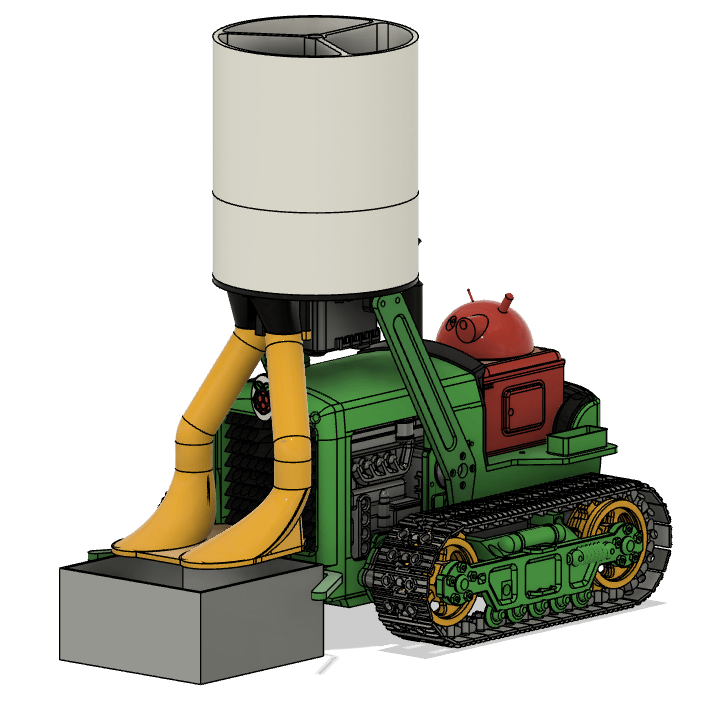
Mk3 uses a rotating drum containing three individual hoppers as used by the East Devon PiRates (https://eastdevonpirates.blogspot.com/). The flow of rice is controlled by a sliding mechanism which is how I think M0o+ (https://blog.usedbytes.com/tags/m0o+/) do theirs. My design is a mixture of the two; the hopper rotates so that the bottom of the hopper aligns with a hole leading to the pipes. So, one servo presents a new hopper and in doing so opens the flow of rice.
I decided on a re-design for two reasons:
- The Archimedes system was a little slow, taking more than 10 seconds to make a delivery.
Mk3 makes a delivery in around 3 seconds. - But more importantly, I didn’t have confidence in the amount of rice being delivered. It appeared that I would have to time the delivery differently for the three different troughs. I could imagine having to make lots of videos to get nine perfect deliveries in a row. And if I lacked confidence then so might the judges.
With Mk3 it is easy to be sure how much rice has been delivered. So long as all (or at least most) of the rice goes in the trough then the perfect amount has been delivered because each hopper holds the right amount of rice plus 20%.
The design uses two down pipes to direct the flow of rice to the trough. This is so that PJD’s radiator grille mounted camera can still get a clear view of the trough (although the last bit of the drive is blinded by the bottom chutes).
In operation PJD deliberately crashes into the troughs so that two front mounted prongs can align the trough with the robot before the delivery takes place; this means that diagonal approaches to the troughs still work. As delivery takes place the robot turns the hopper back and forth through about 10o to make sure the rice doesn’t stop flowing.
During the design process I wanted to measure the volume of rice held in each hopper. But I couldn’t see how to get Fusion 360 to tell me the volume of a void. Two minutes on the internet provided the answer; create a solid then use the hopper as a cutting tool to shape the new solid to the shape of the void (and hence the rice it could contain). Fusion will then tell you the volume of this new body. I could then extrude the top of the design until the volume was exactly 300,000mm3 (this being 20% more than the volume required to half fill a trough). The picture below shows the shape of the rice held within each of the three hoppers.

This system works well and an initial video is “in the bag”. All we need to do now is make a new video where the human elements of the team don’t dilly-dally quite so much!
